基于ADAMS的EPS建模与联合仿真研究
基于ADAMS与MATLAB的EPS联合仿真应用与试验_盛德浩
基于ADA M S与MATLAB的EPS联合仿真应用与试验*盛德浩1,陈安宇2,曹永晟1,张家玺1(1.汽车管理学院装备技术系,安徽蚌埠 233011; 2.浙江大学,浙江杭州 310027)摘 要:应用M ATLA B与ADAM S软件的各自优点,进行联合仿真,可以提高设计效率,降低研究成本。
介绍了联合仿真原理和步骤,以及将基于ADAM S的整车模型和基于MAT LAB的EPS控制系统模型进行针对汽车操纵稳定性的联合仿真试验,研究了EPS对汽车操纵稳定性的影响。
关键词:电动助力转向;ADAM S;M ATLAB;联合仿真;操纵稳定性中图分类号:TP391.9 文献标识码:A 文章编号:1006-4414(2009)01-0096-04A pplication and test on EPS co-si m ulation based on ADAMS andMATLIBSheng De-hao1,Chen An-yu2,C ao Yong-sheng1,Zhang Jia-x i1(1.D epart m ent of equi pmen t and technology,A uto m obile manegmen t instit u te,B engbu A nhui 233011,China;2.Zhej i ang universit y,H angzhou Zhejiang 310027,China)Abstrac t:U n ited si m ulation takes advantage o fADAM S and MAT LAB to advance the e ffi c iency o f design and reduce the cost o f resea rch.In t he paper,t he pr i nciple and process of the un ited si m ulati on,united si m ulation test abou t auto m obil e hand li ng stability based on the veh icle m ode l bu ilt by the ADAM S soft w are and t he EPS(E lectr i c P o w er S tee ri ng)contro l syste m model bu ilt i n MATLAB environment a re i ntroduced and t he i m pacts of EPS on automob ile handli ng stab ility i s st udied.K ey word s:e lectr i c pow er steeri ng(EPS);ADAM S;M ATLAB;united si m u lati on;handli ng stab ilityADAM S是美国MD I公司开发的软件,它为用户提供了强大的建模、仿真环境,使用户能够对各种机械系统进行建模、仿真和分析,具有十分强大的运动学和动力学分析功能,广泛应用于世界各国的工程领域。
基于Adams与Matlab的汽车电动助力转向系统的联合仿真

基于Adams与Matlab的汽车电动助力转向系统的联合仿真一、本文概述随着汽车工业的快速发展和环保理念的深入人心,电动汽车在全球范围内得到了广泛的关注和研究。
电动助力转向系统(EPS)作为电动汽车的重要组成部分,其性能直接影响到车辆的操控性和安全性。
对电动助力转向系统进行深入研究,优化其设计,提高其性能,对于推动电动汽车的发展具有重要意义。
本文旨在通过Adams与Matlab的联合仿真,对汽车电动助力转向系统进行深入研究。
介绍了电动助力转向系统的基本原理和结构,分析了其在实际应用中的挑战和难点。
详细阐述了Adams和Matlab在电动助力转向系统仿真中的应用,包括模型的建立、仿真参数的设置、仿真结果的获取和分析等。
通过Adams进行机械系统的运动学和动力学仿真,结合Matlab进行控制系统设计和优化,实现了对电动助力转向系统的全面仿真分析。
本文的研究方法结合了仿真模拟和理论分析,旨在通过联合仿真,对电动助力转向系统的性能进行深入挖掘和优化。
通过对比不同参数和设计方案下的仿真结果,本文为电动助力转向系统的设计和优化提供了有价值的参考。
本文的研究不仅有助于加深对电动助力转向系统的理解,也为电动汽车的发展提供了有益的探索和实践。
通过Adams与Matlab的联合仿真,我们可以更加准确地预测和优化电动助力转向系统的性能,为电动汽车的安全性和操控性提供有力保障。
二、汽车电动助力转向系统概述汽车电动助力转向系统(Electric Power Steering,简称EPS)是一种通过电动机提供辅助转向力矩的先进转向系统。
该系统主要由转向传感器、车速传感器、扭矩传感器、电子控制单元(ECU)和助力电机等组成。
EPS系统的核心在于电子控制单元,它可以根据驾驶员的转向意图、车速以及转向力矩等因素,实时计算出所需的辅助转向力矩,并通过助力电机为驾驶员提供适当的助力。
与传统的液压助力转向系统(Hydraulic Power Steering,简称HPS)相比,EPS系统具有诸多优势。
基于ADAMS与MATLAB联合仿真的倒立摆设计毕业论文
基于ADAMS与MATLAB联合仿真的倒立摆设计摘要:倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
倒立摆的控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
本文先分别用MATLAB和ADAMS两种软件对倒立摆系统进行建模仿真,然后将两者联合仿真,采用PID控制,用三种方法实现了对倒立摆系统的的控制。
仿真结果互相对比、补充,充分展现了各种仿真方法的特点,并直观的论证出利用两种软件进行联合仿真的优点和意义。
关键词:ADAMS;MA TLAB;倒立摆;联合仿真Design of inverted pendulum based on the co-simulationof ADAMS and MATLABAbstract: The control of inverted pendulum system is a nonlinear,complex, unstable,system, It’s an ideal experimental platform of control theory teaching and carrying out of various control experiments. Control methods of inverted pendulum are widely used in military, aerospace, robotics and general industrial fields, such as robot balance control in rocket launch, the verticality control and satellite flight attitude control. This paper first respectively by MATLAB and ADAMS for modeling and Simulation of the inverted pendulum system, and then combining the two for co-simulation.With the PID control, the control of inverted pendulum system are realized by three methods. The simulation results contrast and complement each other, fully demonstrated the characteristics of various simulation methods, and intuitive proves the advantages and significance of combined simulation using this two kinds of software.Key words: ADAMS,MATLAB,inverted pendulum, co-simulation目录第1章绪论 (1)1.1 课题研究背景与意义 (1)1.2 国内外发展现状 (1)1.3 本论文主要内容 (2)第2章倒立摆的数学模型及控制方法 (3)2.1 建模方法的选择 (3)2.2 倒立摆系统模型 (3)2.3 控制方法的选择 (6)2.4 PID算法简介 (6)本章小结 (8)第3章基于MATLAB的倒立摆控制系统设计 (10)3.1 MATLAB软件简介 (10)3.2 倒立摆系统开环稳定性分析 (11)3.3 摆杆角度PID控制 (12)3.4 小车位移PID控制 (13)3.5 Simulink模型构建 (14)3.6 系统闭环稳定性分析 (14)3.7 系统脉冲响应分析 (15)3.8系统阶跃响应分析 (17)本章小结 (19)第4章基于ADAMS的倒立摆控制系统设计 (20)4.1 ADAMS软件介绍 (20)4.1.1 ADAMS简介 (20)4.1.2 ADAMS软件组成 (20)4.2 ADAMS中倒立摆控制方案 (22)4.3 倒立摆ADAMS模型建立 (22)4.4 PID控制 (24)4.4.1 不加控制时系统仿真分析 (24)4.4.2 PID控制时系统仿真分析 (26)本章小结 (27)第5章基于MATLAB和ADAMS联合仿真的倒立摆控制系统设计 (29)5.1 ADAMS与MATLAB联合仿真意义 (29)5.2 ADAMS与MATLAB联合仿真过程 (29)5.2.1 建立ADAMS模型 (29)5.2.2 确定ADAMS的输入输出 (30)5.2.3 ADAMS与MATLAB的连接 (31)5.2.4 构建控制模型 (32)5.2.5 联合仿真 (34)本章小结 (35)总结 (36)致谢................................................... 错误!未定义书签。
基于ADAMS的EPS系统的控制与仿真

第6期(总第205期)2017年12月机械工程与自动化MECHANICAL ENGINEERING&AUTOMATIONNo . 6Dec .文章编号:1672-6413(2017)06-0053-04基于A D A M S 的E P S 系统的控制与仿真*李亚文(山西机电职业技术学院,山西长治 046011)摘要:通过建立E P S 系统的动力学方程,在ADAM S/C.ar 模块建立多体动力学整车模型,并利用MAT-LAB/Simulink 建立 两种控 制算法 下的仿 真模型 ,并 对汽车 不同行 驶工况 下的操 纵稳定 性进行 了仿真 分析。
对比分析结果表明:配备E P S 系统的车辆在低速回正工况下具有较好的操纵稳定性,改善了汽车的安全行 驶性能,同时模糊P ID 控制比传统的P ID 控制更能使系统获得最隹的转向助力。
关键词:E P S 系统;控制策略;联合仿真;ADAMS 中图分类号:TP391. 7 文献标识码:A〇引言随着汽车行业的发展和人们生活质量的提高,要求其不仅要有良好的安全性能,还要有较高的舒适性, E P S 系统很好地解决了车辆在行驶过程中“轻”与 “灵”的矛盾,极大地满足了消费者在这两方面的要求。
本文建立了 E P S 系统的数学模型,并利用M AT - LAB/Simulmk 建立 两种控 制算法 下的仿 真模型 ,对 汽车不同行驶工况下的操纵稳定性进行了验证分析。
1EPS 系统的结构与工作原理1.1 E P S 系统的结构电动助力转向系统(E P S )主要由电子控制单元 ECU 、扭矩传感器、车速传感器(图中未画出)、助力电 动机、离合器和转向柱总成(包括转向轴、齿轮齿条转 向器)等组成,如图1所示。
当转向盘受到外力作用而发生转向时,转矩传感 器就会以非常快的速度检测出两轴之间的阻力矩大 小。
与此同时,汽车的行驶速度也会被车速传感器检 测出来,被测出的车速和转向阻力矩的大小变为电信*山西省教育科学“十二五”规划2015年度规划课题(GH-15064)收稿日期:2017-04-17;修订日期:2017-10-15号后传输给e c u ,e c u 根据车速传感器和转矩传感 器的信号决定电动机的旋转方向和助力电流的大小, 并将指令传递给电动机[^4]。
轿车EPS动力学联合仿真与分析
模 板 要 在 模 板 建 模 器 的 模 式 下 建 立 ,建 模 主 要
有 2种 方法 ,一是 可 以通过 修 改系 统 白带 的相 似模 板
o l t cp we si e te i g( P ) T r u h te c mb n d s lt n t eef c o P n h n l g s b l y ne cr o r s tds r e i a s e n E S . h o g o i e i ai f t fE S o a d i t i t h mu o h e n a i
和 在 MA L B 软件 里 建 立 的 E S控 制 模 块 ,并 采 用 进 行 转配 ,然后 进行 调试 ,让每 个系 统 能交 换数据 , TA P
机 电 一 体 化 联 合 仿 真 的方 法 ,对 装 有 E S的汽 车 和 从而 形成 一 个整 体 ,建 立 的整车 机械 模 型 ,如 图 1 P 所 没 有 电动助 力 转 向 的汽车 分别 进 行操 纵稳 定 性试 验 ,
Ke r s ADAMS; ATLAB; e t i o ra sse te ig( ywo d : M Elc rcp we sitdse r n EPS ; mb n d smulto Ha dl gsa iiy ) Co i e i a in; n i t b l n t
汽车 的操 纵 稳定 性 作为 评价 汽 车安 全性 能 的一 个 对 所 要建 立 的子 系统 进 行分 解 以及动 力 学和 运动 学抽 重 要指标 ,人们 对其 提 出 了越来 越 高 的要 求 。相较 于 象 ,构建 各 子系 统 的拓 扑结 构 图 ,然 后正 确地 建立 零 众 多传 统 液压 助 力 转 向系 统 ,E S ( P 电动 助 力转 向系 部件 之 间 的链接 关系 和通 讯 器 ,有些 数据 在 总成 阶段 统 )在提 高汽 车 的操 纵稳 定性 方 面 具有 不可 比拟 的优 是 不 能更 改 的 ,所 以 自建模 的 时 间一 定要 注 意 口。 】 点 。文 章采 用 在 ADA MS软件 里建 立 的整 车机械 模 型 建好 整 车需 要 的每个 系统 模 板后 ,在 标准 模式 下
adams与matlab联合仿真例子(正确没商量)
Adams与Matlab联合仿真例子作者寄语:这个文件是基于李增刚《adams入门详解与实例》一书中,Adams与Matlab联合仿真的例子,以及一个名为《2013版ADAMS与Matlab联合仿真(绝对正确版)》的pdf文件上修改来,为了方便起见,用了一些复制、粘贴,所以中间的一些过程会和这两个文件有所重合,不要惊讶,也不要吐槽。
做这个例子的目的,是站在一个普通学习者的角度,介绍联合仿真,和众多学习adams的人共勉。
我的结论是:以上两个例子中的结果并不矛盾,都是正确的,基本上看了我的例子后,他们的也就懂了。
李增刚第236页开始。
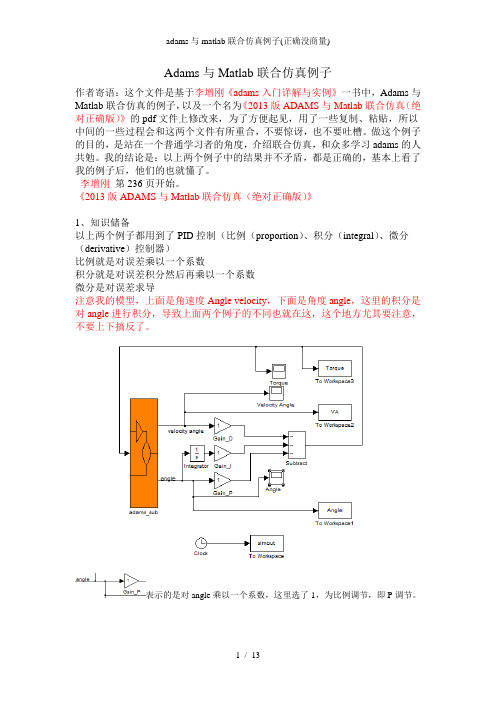
《2013版ADAMS与Matlab联合仿真(绝对正确版)》1、知识储备以上两个例子都用到了PID控制(比例(proportion)、积分(integral)、微分(derivative)控制器)比例就是对误差乘以一个系数积分就是对误差积分然后再乘以一个系数微分是对误差求导注意我的模型,上面是角速度Angle velocity,下面是角度angle,这里的积分是对angle进行积分,导致上面两个例子的不同也就在这,这个地方尤其要注意,不要上下搞反了。
表示的是对angle乘以一个系数,这里选了1,为比例调节,即P调节。
就是对angle的积分,(就是累加的意思),即I调节,然后乘以了系数1。
因为输出的是角速度,角速度就是angle的微分的,所以不用做什么操作,后面乘以了一个系数1。
然后这三个相加起来作为反馈调节,所以用了这个模块,这个表示累减。
将角度值送到Matlab的workspace工作空间,这个表示把时间送到workspace中去,因为角度这里是角度与时间的函数。
注意:这些模块不是必要模块,我只是为了做对比而加上去的,去掉不会对仿真产生影响,但是如果要加的话这两个模块缺一不可。
我的软件是adams2012与Matlab 7.12.0(R2011a)。
现在进入正题1、设置单位启动ADAMS/View,选择新模型,在模型名输入link。
基于MATLAB和ADAMS的汽车ESP联合仿真
摘要汽车电子稳定程序系统ESP是一种新型主动安全控制系统,也是最近几年汽车安全领域研究的热点。
这种新型系统能够根据汽车驾驶员的意图和路面状况主动的控制汽车的运动,避免危险状况的发生,提高行驶安全性。
本文首先对ESP的稳定控制原理进行了分析,并利用Matlab/simulink 建立了汽车二自由度模型,得到汽车在行驶中理论的横摆角速度和质心侧偏角,然后在Adams/Car建立了汽车整车模型,并对该模型进行了仿真试验,以便为后续的实验研究提供准确的模型。
在控制方面选用PID控制,以横摆角速度和质心侧偏角的误差作为输入,把调整汽车稳定所需要的力矩作为输出。
用Adams/Control将汽车模型和Simulink连接后,又对整车车进行了转向盘阶跃模拟试验,试验结果表明配有ESP系统的汽车有比较好的路径保持能力,转弯半径明显减小,且横摆角速度和质心侧偏角都能得到较好的控制。
由此可以看出ESP确实能较好的改善汽车操纵稳定性和汽车行驶的安全性。
关键词:汽车;ESP;二自由度模型;PID控制;联合仿真。
参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参AbstractESP Electronic Stability Program system is a new active safety control system. In recent years it also became the hot field of automotive safety research. The new system based on the intention of driver can actively control and road conditions motorists sports car, to avoid dangerous situations and improve driving safety.The ESP stability control principle is analyzed at first,and the two degree of freedom model car is also established by Matlab / Simulink .From it getting the theory of yaw rate and lateral sideslip angle, then Adams / car automobile model was established. At last a simulation experiment is made on this model in order to provide an accurate model for the subsequent experimental study. As control ,the PID control is used and the yaw rate and sideslip angle error are used as input, the torque required to adjust the car stable as output.With Adams / Control after the car model and Simulink connection, and carried out on the vehicle steering wheel vehicle simulation step.The results showed that the car is equipped with ESP systems ability to maintain a relatively good path, turning radius is significantly reduced, and the yaw rate and sideslip angle can be better controlled. It can be seen that ESP really can better improve vehicle handling and stability and safety of cars.Key words: Vehicle; ESP; Two degrees of freedom model ; PID control;C o-simulation;参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参目录摘要 (I)Abstract (II)1 绪论 (1)1.1 研究ESP的背景和意义 (1)1.2 ESP系统的关键技术 (2)1.3 国内外ESP 系统研究 (3)1.4本文研究的主要内容 (8)2 ESP系统的基本理论 (9)2.1汽车失稳的原因分析 (9)2.2 ESP系统的介绍 (11)2.3 ESP系统的控制策略分析 (13)2.4本章小结 (15)3 汽车模型的建立 (16)3.1 相关软件的介绍 (16)3.2 影响汽车稳定性的参数 (21)3.3 汽车参考模型的建立 (22)3.4 Adams/Car汽车模型的建立 (24)3.5整车模型的检验 (28)3.6本章小结 (30)4 基于汽车ESP控制系统的设计 (31)4.1 ESP系统控制系统的分析 (32)4.2 PID控制系统 (34)4.3 本章小结 (41)参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参5 基于Adams和Matlab 的汽车ESP联合仿真 (42)5.1联合仿真的简介 (42)5.2导入Adams子系统模型 (43)5.3 PID控制的ESP仿真模型的建立与分析 (46)5.5 本章小结 (49)6 结论与展望 (50)参考文献 (52)致谢 (54)附录 (55)参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参1 绪论1.1 研究ESP的背景和意义在现代社会中,汽车在我们的日常生活中充当着重要角色,成为人们日常工作生活不可或缺的工具,相应的汽车的安全性也越来越受到人们的关注。
基于Adams与Matlab的汽车电动助力转向系统的联合仿真
become
a
kind of technic in power steering system which is widely used nowadays.
The development of computer
technology and
the coming of virtual modeling
technology
system control simulation software were also introduced.
The
third chapter is devoted to modeling the process of this
article.That
is
described the simplification and assumptions
in detail.Modeling methods of various
subsystems
and vehicle
assembly were introduced too.
on
In chapter four,we focusing
the modeling process of electric power steering
in detail.Modeling methods of various
subsystems
and vehicle
assembly were introduced too.
on
In chapter four,we foccess of electric power steering
study and analysis
on
the
vehicle handing
基于Adams和Matlab的汽车EPS控制联合仿真
- 1
- 1 2 0 . 0 0 04 7N ·m ·r a d ·s ; B m 为电动机黏性阻 - 1 0 . 0 0 33N ·m ·r a d ·s ; K 尼系数, m 为电机和减 - 1 速机构的等效刚度系数, 1 2 5N ·m ·r a d ; θ m 为
第2 4卷 第 1 0期
重 庆 理 工 大 学 学 报( 自然科学)
2 0 1 0年 1 0月
J o u r n a l o f C h o n g q i n gU n i v e r s i t yo f T e c h n o l o g y ( N a t u r a l S c i e n c e ) V o l . 2 4 N o . 1 0 O c t . 2 0 1 0
的模型以线性二自由度或三自由度汽车和简单的 线性轮胎模型为主, 通过简单的参数来模拟, 未能 很好 地 反 映 汽 车 真 实 的 运 动 学 和 动 力 学 特
2 - 4 ] 性[ 。建立复杂汽车模型后, 控制策略以基本
助力控制为主, 较少考虑回正性能和不同车速下
5 - 6 ] 对路感的要求 [ 。本文建立了更真实精确的多
图1 齿轮齿条转向系统
1 整车动力学模型
图2 整车模型示意图
根据汽车多体动力学理论及 A d a m s / C a r 的建 模方法, 以某款 A级轿车为研究对象, 并做如下简 化: 簧载质量视为一个具有六自由度的刚体; 考虑 前后副车架和发动机、 变速器等的质量, 因为它们 影响转向时方向盘转矩的大小; 动力传动系统为 前置前驱式, 发动机、 离合器、 变速器等部件的参 数以属性文件保存; 轮胎、 弹簧、 阻尼等元件用特 性文件描述其力学特性, 其余部件视为刚体; 刚体 万方数据 间的连接采用线性衬套, 不考虑各运动副的摩擦
基于ADAMS与MATLAB的倒立摆联合仿真实验5篇
基于ADAMS与MATLAB的倒立摆联合仿真实验5篇第一篇:基于ADAMS与MATLAB的倒立摆联合仿真实验基于ADAMS与MATLAB的倒立摆联合仿真实验一、实验目的在传统的机电一体化研究设计过程中,机械工程师和控制工程师虽然在共同设计开发一个系统,但是他们各自都需要建立自己的模型,然后分别采用不同的分析软件,对机械系统和控制系统进行独立的设计、调试和试验,最后进行机械系统和控制系统各自的物理样机联合调试,如果发现问题又要回到各自的模型中分别修改,然后再联合调试,显然这种方式费时费力。
基于多领域的建模与联合仿真技术很好的解决了这个问题,为机械和控制系统进行联合分析提供了一种全新的设计方法。
机械工程师和控制工程师就可以享有同一个样机模型,进行设计、调试和试验,可以利用虚拟样机对机械系统和控制系统进行反复联合调试,直到获得满意的设计效果,然后进行物理样机的建造和调试。
ADAMS与MATLAB是机械系统仿真和控制系统仿真领域应用较为广泛的软件,其中ADAMS为用户提供了强大的建模、仿真环境,使用户能够对各种机械系统进行建模、仿真和分析,具有十分强大的运动学和动力学分析功能;而MATLAB具有强大的计算功能、极高的编程效率及模块化的建模方式,因此,把ADAMS与MATLAB联合起来仿真,可以充分将两者的优势相结合,将机械系统仿真分析同控制系统设计有机结合起来,实现机电一体化的联合分析。
本实验以倒立摆为例,进行ADAMS与MATLAB的联合仿真,对倒立摆的运动性能和运动规律进行分析。
二、实验方法软件环境:MD ADAMS R3,MATLAB R2009b 2.1 建立倒立摆的动力学模型启动ADAMS/View模块弹出如图1所示对话框,建立小车及摆杆模型。
首先选择“Create a new model”选项,创建一个新的模型,将该文件保存在相应的文件夹下,本实验将结果保存在E:daolibai_adams文件夹下,将文件名取为“daolibai_adams”,其余选项保持默认。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
●军用车辆工程 M ilit ary Veh i cle Eng i n eer i n g基于ADA MS 的EPS 建模与联合仿真研究盛德浩,陈安宇,张家玺(汽车管理学院装备技术系,安徽蚌埠233011)摘 要:以EPS 控制系统对于安装了EPS 汽车的操纵稳定性是否有重要影响为研究目的,应用MAT LAB 与ADAMS 软件相结合的方法,建立了EPS 控制系统仿真模型与整车仿真模型,并进行了联合仿真研究,结果显示EPS 控制系统对汽车转向性能有重要影响。
关键词:动力学模型;联合仿真;控制系统;ADAMS;MAT LAB 中图分类号:TP391.9 文献标志码:A 文章编号:1674-2192(2009)04-0064-07D esi gn and Research on EPS Con trol SystemS i m ul a ti on M odel Ba sed on ADAM SS HE NG De -hao,CHE N An -hu,ZHANG J ia -xi(Equi pment Technol ogy Depart m ent,Aut omobile Mange ment I nstitute,Bengbu 233011,China )Abstract:This paper ai m s at studing whether electric power assisting characteristic has i m pacts on handling stability of ve 2hicle with EPS,and intr oduces that the vehicle model built by the ADAM S s oft w are and the EPS (Electric Power Steering )contr ol syste m model built in MAT LAB envir on ment are used t o set up the united si m ulati on .Research conclusi on p r oves the EPS contr ol syste m has i m portant i m pacts on aut omobile steering perfor mance .Keywords:dyna m ic model;united si m ulati on;contr ol syste m;ADAMS;MAT LAB 收稿日期:2008-10-12;修回日期:2009-05-08.作者简介:盛德浩(1974— ),男,硕士,讲师. 转向系统是汽车的主要子系统之一,其性能直接关系到车辆的舒适性和安全性。
随着人们对汽车舒适性和安全性要求的日益提升,越来越多的汽车开始应用集环保、节能、安全、舒适为一体的电动助力转向系统。
计算机技术的迅速发展,机械系统多体动力学软件ADAM S 和科学工程计算软件MAT LAB 的开发,为电动助力转向系统的研究提供了更为方便有效的平台。
本文在对EPS 深入研究的基础上,用ADAM S 软件建立整车模型,并用MAT LAB 软件建立EPS 控制系统模型。
应用MAT LAB 与ADAM S 软件相联合,将电动助力转向控制系统与整车模型相结合,进行联合仿真研究。
1 基于ADAM S /Car 整车动力学模型的建立 ADAM S /Car 采用的用户化界面是根据汽车工程师的习惯而专门设计的。
工程师不必经过任何专业培训,就可以应用该软件开展卓有成效的开发工作。
ADAM S /Car 包括整车动力学模块(vehi 2cle dynam ics )和悬架设计模块(sus pensi on design ),其仿真工况包括:方向盘角阶跃、斜坡和脉冲输入、蛇行穿越试验、漂移试验、加速试验、制动试验第11卷 第4期2009年7月军事交通学院学报Journal of Acade my of M ilitary Trans portati onVol .11 No .4July 2009和稳态转向试验等。
整车系统划分为前后悬架系统、车身、转向系统、轮胎系统、动力总成系统等。
如图1所示,整车模型通过通讯器(communicate )将各子系统联系到一起。
通讯器在模板中建立,它表示各子系统间的相互关联。
图1 ADAM S /Car 建模原理图在ADAM S /Car 下建立一个典型的整车系统动力学模型,如图2所示为本文研究所建立的整车模型。
图2 整车模型2 EPS 动力学模型的建立图3为本文研究的电动转向系统的简化模型。
为了分析方便,把前轮和转向机构向转向轴简化,扭矩传感器安装在方向盘和减速机构之间,可以看成是刚度为K s 的扭力杆,实时测量方向盘输入扭矩。
直流电动机的输出扭矩经过蜗轮蜗杆放大后,与输入扭矩一起作用于转向轴上,从而实现转向和助力的过程。
1)扭杆动力学方程为T h -T s =J h ¨θh +B h θh(1)2)传感器输入转矩为T s =K s (θh -θc )(2)3)转向阻力矩为T L =K c ・θc(3)图3 电动转向系统动力学模型4)扭矩测量值为T s -T L =J c ¨θc +B c θc(4)5)电动机动力学方程为T m -T a G=J m ¨θm +B m θm(5)6)直流电机电磁转矩为T m =K T ・I m (6)7)电机输入电压为u =K E θm +R I m +L I ・m(7)式中:T h 为转向盘上施加的转向力矩;T s 为转矩传感器检测到的转向力矩;T L 为等效到转向轴的转向阻力矩;T m 为助力电机产生的电磁转矩;T a 为助力电机作用到转向轴上的助力转矩;θh 为转向盘转角;θc 为前轮等效到转向轴转角;θm 为助力电机转角;I m 为助力电机电流;u 为电机电枢控制输入电压;J h 为转向盘转动惯量,J h =0.04kg ・m 2;J c 为前轮及转向机构向转向轴等效后转动惯量,J c=0.06kg ・m 2;J m 为助力电机转动惯量,J m =4.52×10-4kg ・m 2;B h 为转向轴与支撑之间的摩擦系数;B c 为转向机构与前轮等效到转向轴的摩擦系数,B c =3N ・m ・s/rad ;B m 为助力电机转轴与支撑之间的摩擦系数,B m =3.39×10-3N ・m ・s/rad ;K c 为等效到转向轴前轮侧偏刚度,K c =605N ・m /rad ;K T 为助力电机电磁转矩系数,K T =0.04N ・m /rad ;K E 为助力电机反电动势系数,K E =0.02V ・s ;R 和L 分别为助力电机的电阻和电感,R =0.04Ω,L =1×10-4H ;G 为助力电机的传动比,G =16.5。
3 EPS 助力控制策略电动助力转向的助力特性有直线型、折线型和曲线型3种典型的形式。
本文研究中采用的是直线型助力特性曲线,如图4所示。
目前,EPS 系统有采用更多传感器的趋势,如562009年7月盛德浩等:基于ADAM S 的EPS 建模与联合仿真研究图4 直线型助力特性采用角度位置传感器以获得良好的回正特性,采用横摆角速度传感器以改进车辆的操纵稳定性[2],但其主要工作原理仍然是基于转向转矩传感器的转向转矩助力控制。
图4是其基本助力特性曲线图,它规定了助力电机的目标电流与车速V 及驾驶员的转向操纵输入力矩T d 的关系。
这样的设计要求,可以兼顾汽车低速时的转向轻便性和高速时的操纵稳定性,以及驾驶员在操纵汽车时对路感的要求。
为了实现上述理想的EPS 助力特性,就需要对助力电机控制器进行设计。
目前EPS 控制系统中最常见的助力电机控制方式主要是助力电机电流的闭环给定控制[3],其控制功能结构框图如图5所示。
图5 助力电机电流给定闭环控制在应用中,图4的助力特性图的纵坐标电机电流给定变量I set ,与要求的目标助力力矩T a 之间的关系为I set =T a /K i G(8)助力电机产生的力矩T m 与其电枢电流I m 的线性关系为T m =K T I m(9)式中:K T 是助力电机电磁转矩系数。
因此这样的控制结构能使EPS 的助力特性较好地按照图4的助力特性图工作。
在这样的EPS 系统中,对实际的助力特性调整也较直观和容易。
另外,电流闭环控制用的P I D 控制,设计过程简单、控制参数调整方便和直观、控制算法实现容易、对控制用单片机的工作速度要求也不高,到目前为止,这样的控制结构仍是一种较经济实用的EPS 助力电机控制策略。
4 联合仿真控制系统模型设计4.1 联合仿真原理ADAM S 和控制软件之间是通过状态变量进行通讯的。
因此,输入输出必须基于一组状态变量进行定义。
在ADAM S /Control 中,输出指从AD 2AM S 传到控制软件的数据,输入指从控制软件传回ADAM S 的数据,这样,输入输出就在ADAM S 和控制软件中形成闭合回路[1-2],如图6所示。
图6 联合仿真示意图ADAM S 建立联合仿真系统的机械模型并添加外部载荷及约束,MAT LAB /Si m ulink 建立联合仿真系统的控制部分,ADAM S /Controls (控制模块)将两者连接起来,利用MAT LAB /Si m ulink 的控制输出来驱动机械模型,并将ADAM S 中机械模型的位移、速度等输出反馈给控制模型,实现在控制系统软件环境下的交互式仿真,还可以在ADAM S /V iew 或ADAM S /Solver 中观察仿真结果。
对于使用ADAM S 和MAT ALAB 的联合仿真来说,联合是由MAT ALAB 的子程序来控制的,这个子程序建立了数据交换的通道,并在每一个时间段启动AD 2AM S 。
在仿真过程中,2个软件包使用相同的时间步长,在每个时间步的开始和结束,2个软件包交换输入输出信号数据。
对于2个软件通信间隔的时间步长由数字的稳定性和仿真的精确度来决定。
4.2 联合仿真控制系统模型设计在已经建立好的整车模型的基础上,通过设定控制系统的输入、输出参数,使它们和控制系统相连。
将模型的助力扭矩设定为输入,将模型的方向盘转矩和车速变量设定为输出,同时将这些变量作为控制器的输入传递给控制系统。
设置好系统参数后,在ADAM S 中利用ADAM S /Controls 模块,输出联合仿真文件,此文件包含了整车模型的参数。
最后可得出联合仿真控制模型,结构框图如图7所示。
66 军 事 交 通 学 院 学 报第11卷 第4期图7 联合仿真模型5 联合仿真结果及分析利用联合仿真控制系统模型,并参照文献[3]对转向操纵性能进行评价的相关规范,对装备EPS 整车模型进行与转向特性相关的性能参数的仿真分析。