MIT公开课-线性代数笔记
线性代数笔记
线性代数序章线性代数基础知识1.单位矩阵:对角线上均为1,其余元素都是0的n 阶方阵,记作I在矩阵多项式f(A) 中单位阵I 对应代数多项式 f(x) 中的 1,纯量阵kI 对应常数k 2.零矩阵:元素全为0的矩阵,记作O3.矩阵的p 阶子式:设},min{n m L =,指以)(L p a a pp ≤-11的p 个元素为主对角线构成的,含2p 个元素的p 阶方阵的行列式第一篇线性空间第一章向量和向量组1.1 线性组合1.向量组和矩阵的对应关系:一个向量组A 对应一个矩阵的列(或行)向量组A’2.线性表示:如果存在一组数{}i x 使向量∑==ni ii i ax b 1,那么称b 能被向量组A (或记{}i a )线性表示;也就是线性方程组Ax=b 有解(这也是求坐标表示的方法)3.等价:如果向量组B’中的任何向量b 都能被组A’线性表示,反之亦成立,称组B’和组A’等价; 也就是矩阵方程AX=B 和BX -1=A 都有解,即)()(B r A r = 行向量组等价与矩阵等价的关系:(1)向量组的等价(不要求两个组同向量数)和矩阵的等价(要求两个阵同型)是不同的概念 (2)当两个同型矩阵A ,B 的列向量组等价,A 与B 等价此时:方程Ax=0和Bx=0同解,r(A)=r(B)(3)当矩阵A 与B 等价,经行/列变换得到B ,则A 与B 的行/列向量组等价1.2 线性相关性和秩1.线性相关:对于向量n a a a ,...,,21,如果存在不全为零的实数n k k k ,...,,21使得01=∑=ni ii ak ,那么这些向量线性相关,也就是方程Ak=0有非零解线性无关:对于向量n a a a ,...,,21,如果当且仅当n k k k ,...,,21全为零时,才有01=∑=ni ii ak ,那么这些向量线性无关,也就是方程Ak=0只有零解2.判定方法:如果向量组A 对应的矩阵的秩<向量数,则组A 线性相关; 如果向量组A 对应的矩阵的秩 = 向量数,则组A 线性无关;3.向量组的秩定义:向量组A 中线性无关向量的最大个数,记为r ,A 中任意r+1个向量都线性相关4.向量组与矩阵的秩:矩阵的秩 = 行向量组的秩 = 列向量组的秩1.3 基、维数和坐标1.基:如果向量空间V 中任一向量都可被V 中一线性无关向量组A 线性表示,称组A 为V 的一个基 基变换:设A,B 为V 的两组基,记B A P 1-=为过渡矩阵,则A P B T=2.维数:基中的向量数r (也是基的秩)称为向量空间V 的维数,称V 为r 维向量空间3.坐标:如果向量空间V 中一向量∑==ni ii i ax b 1,且{}i a 是V 的基,则称{}i x 为b 在基A 中的坐标证明向量组A 是空间V 的基,就是要写出V 中任一向量{}i b 在基A 中的坐标表达式坐标变换:设A,B 为V 的两组基,对应坐标为x,y ,记B A P 1-=为过渡矩阵,则x P y 1-=1.4 范数、投影和正交性1.向量的范数:x x xx T ni i==∑=12,n 为向量维数2.广义的向量夹角:ba ba b a T = ,cos ;b 在a 上的投影:a a a b a p T T =3.向量的正交性:两个向量x,y 的点积(或y x T)为零,则两向量正交;零向量没有长度,和所有向量都正交正交和线性相关性:如果一组向量互正交,则它们线性无关4.规范正交基:两两正交的单位基向量组向量的坐标:设q 为规范正交基,若向量∑==n i i i q x b 1,则坐标b q x T i i =或写作b Q x T =5. 基向量的规范正交化:第二章向量空间2.1 向量空间和子空间1.向量空间:对加法和数乘封闭,包含所有n 维实向量的非空集合,记作nR 公理化定义:设V 是一非空集合,R 为实数域; Part1:运算的封闭性若对于任意两个元素V ∈βα,,总有唯一的元素V ∈γ 与之对应,称γ 为βα ,的和;若对于实数λ与任一元素V ∈α,总有唯一的元素V ∈δ与之对应,称δ 为λα,的积;Part2:运算的法则 八条运算律分别为:(1)加法交换律(2)加法结合律(3)加法元为0 (4)元素的负元素唯一 (5)乘法元为1 (6)乘法交换律(7)数乘结合律(8)乘法结合律若和与积运算具备封闭性且满足八条运算律,即称V 为实向量空间,V 中元素称为向量。
超详细MIT线性代数公开课笔记_完整版

列图像 Column Picture 在列图像中,我们将系数矩阵写成列向量的形式,则求解原方程变为寻找列向
量的线性组合(linear combination)来构成向量 b。
4
x
2 1
y
1 2
0 3
向量线性组合是贯穿本课程的重要概念。对于给定的向量 c 和 d 以及标量 x 和 y,我们将 xc+yd 称之为 c 和 d 的一个线性组合。
第 01 讲 行图像和列图像
Row picture & Column picture
线性方程的几何图像 The geometry of linear equations 线性代数的基本问题就是解 n 元一次方程组。例如:二元一次方程组 2x y 0 x 2y 3
写成矩阵形式就是
2 - 1
- 1x 2y
从几何上讲,我们是寻找满足如下要求的 x 和 y,使得两者分别数乘对应的列向
量之后相加得到向量
0 3
。其几何图像如下图。
2 蓝色为向量 - 1 ;
- 1
红色为向量
2 ;
可以看到当蓝色的向量乘以 1 与红色的
向量乘以 2(红色虚线)后做加法(首尾 0
相接)就可以得到绿色的向量 b= 3 ,
由此可得到方程的解 x=1,y=2。
0 3
其中
A=
-
2 1
-
1 2
被称为系数矩阵(coefficient
matrix)。
未知数向量通常记为
x=
x y
而等号右侧的向量记为 b。线性方程组简记为 Ax=b。
行图像 Row Picture
行图像遵从解析几何的描述,每个 方程在平面上的图像为一条直线。找到 符合方程的两个数组,就可以确定出 x-y 平面上的两个点,连接两点可以画 出该方程所代表的直线。两直线交点即 为方程组的解 x=1,y=2。
麻省理工上课讲义 线性代数[第1集]An overview of key ideas
![麻省理工上课讲义 线性代数[第1集]An overview of key ideas](https://img.taocdn.com/s3/m/d06af96bf242336c1eb95e5e.png)
Vectors
What do you do with vectors? Take combinations. We can multiply vectors by scalars, add, and subtract. Given vectors u, v and w we can form the linear combination x1 u + x2 v + x3 w = b. An example in R3 would be: ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ 1 0 0 u = ⎣ −1 ⎦ , v = ⎣ 1 ⎦ , w = ⎣ 0 ⎦ . −1 1 0 The collection of all multiples of u forms a line through the origin. The collec tion of all multiples of v forms another line. The collection of all combinations of u and v forms a plane. Taking all combinations of some vectors creates a subspace. We could continue like this, or we can use a matrix to add in all multiples of w.
Subspaces
Geometrically, the columns of C lie in the same plane (they are dependent; the columns of A are independent). There are many vectors in R3 which do not lie in that plane. Those vectors cannot be written as a linear combination of the columns of C and so correspond to values of b for which C x = b has no solu tion x. The linear combinations of the columns of C form a two dimensional subspace of R3 . This plane of combinations of u, v and w can be described as “all vectors C x”. But we know that the vectors b for which C x = b satisfy the condition b1 + b2 + b3 = 0. So the plane of all combinations of u and v consists of all vectors whose components sum to 0. If we take all combinations of: ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ 1 0 0 u = ⎣ −1 ⎦ , v = ⎣ 1 ⎦ , and w = ⎣ 0 ⎦ 0 −1 1 we get the entire space R3 ; the equation Ax = b has a solution for every b in R3 . We say that u, v and w form a basis for R3 . A basis for Rn is a collection of n independent vectors in Rn . Equivalently, a basis is a collection of n vectors whose combinations cover the whole space. Or, a collection of vectors forms a basis whenever a matrix which has those vectors as its columns is invertible. A vector space is a collection of vectors that is closed under linear combina tions. A subspace is a vector space inside another vector space; a plane through the origin in R3 is an example of a subspace. A subspace could be equal to the space it’s contained in; the smallest subspace contains only the zero vector. The subspaces of R3 are: 3
人工智能+Python:MIT线性代数课程笔记
知识概要本节始,们来学习线性代数的有关知识,首节们从解方程谈起,学习线性代数的应用之一就求解复杂方程问题,本节核心之一即为从行图像与列图像的角度解方程。
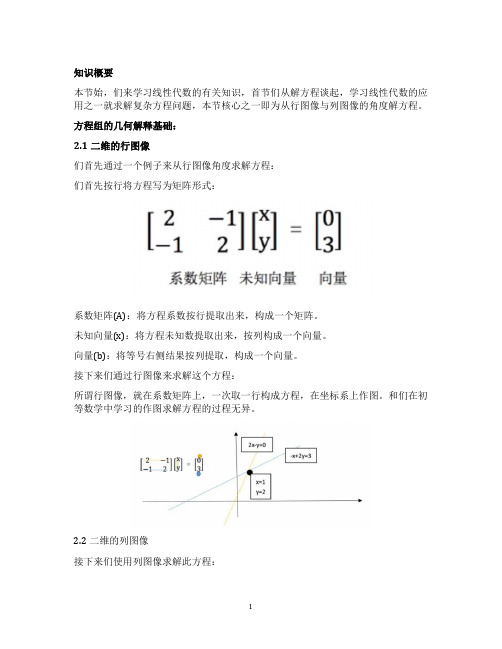
方程组的几何解释基础:2.1二维的行图像们首先通过一个例子来从行图像角度求解方程:们首先按行将方程写为矩阵形式:系数矩阵(A):将方程系数按行提取出来,构成一个矩阵。
未知向量(x):将方程未知数提取出来,按列构成一个向量。
向量(b):将等号右侧结果按列提取,构成一个向量。
接下来们通过行图像来求解这个方程:所谓行图像,就在系数矩阵上,一次取一行构成方程,在坐标系上作图。
和们在初等数学中学习的作图求解方程的过程无异。
2.2二维的列图像接下来们使用列图像求解此方程:即寻找合适的x,y使得x倍的(2,-1)+y倍的(-1,2)得到最终的向量(0,3)。
很明显能看出来,1倍(2,-1)+2倍(-1,2)即满足条件。
反映在图像上,明显结果正确。
3方程组的几何解释推广3.1高维行图像如果绘制行图像,很明显这一个三个平面相交得到一,们想直接看出这个的性质可谓难上加难。
比较靠谱的思路先联立其中两个平面,使其相交于一条直线,在研究这条直线与平面相交于哪个,最后得到坐标即为方程的解。
这个求解过程对于三维来说或许还算合理,那四维呢?五维甚至更高维数呢?直观上很难直接绘制更高维数的图像,这种行图像受到的限制也越来越多。
3.2高维列图像左侧线性组合,右侧合适的线性组合组成的结果,这样一来思路就清晰多了,“寻找线性组合”成为了解题关键。
很明显这道题一个特例,们只需要取x=0,y=0,z=1。
就得到了结果,这在行图像之中并不明显。
当然,之所以们更。
《线性代数》学习笔记三

主 题: 《线性代数》学习笔记 内 容:《线性代数》学习笔记三——矩阵的概念、运算、分块矩阵1. 矩阵概念定义:由mxn 个数a ij (i-1.2,……,m;j=1.2,……,n)排成m 行n 列的数表 ⎪⎪⎪⎪⎪⎭⎫⎝⎛=mn m m n n a a a a a a a a a A 212222111211称为一个mxn 矩阵,a ij 称为第i 行第j 列上的元素,可简记作A=(a ij )mxn 或Amxn ,当m=n 时也称Amxn 为n 阶方阵,可记为An 。
当m=1时,Amxn=(a 11,a 12,……a 1n )称为行矩阵,当n=1时,⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=12111m mxna a a A 称为列矩阵,有元素皆为0的矩阵称为零矩阵,记作0。
对于n 阶方阵An ,称a n ,a 22 ,…,nn a 为A 的全对角线上元素称∑=ni ii a 1为分阵A 的迹,记作tr A ,即tr A =1nii i a 。
当n 阶方阵A 的主对角线以下(上)的所有元素皆为零称A 为上(下)三角形矩阵,除主对角线上元素外其元素皆为零的方阵为对角形矩阵,主对角线上有元素皆为1的对角形矩阵称为单位方阵,记作F 即⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=100010001F 2.矩阵运算1加法A=(ij a )mxn ,B=(ig b )mxn 则A+B=(a ij +b ij )mxn即只有两个矩阵都是mxn 矩阵,也称为同型矩阵,才能做加法运算。
称(-a ij )mxn 为A 的负矩阵,记作-A ,即-A=(-a ij )mxn 。
由此可定义A -B=A+(-B )=(a ij -bij )mxn 。
证与数的加、减运算类似,矩阵的加法运算满足 (1)A+B=B+A (交换律)(2)(A+B )+C=A+(B+C )(结合律) (3)A+O=O+A=A ,(4)A+(-A )=(-A )+A=O 2.数乘:设K 是一个数, mxnijmxnA a 则R 与矩阵A 相乘定义为111212122212n n ijmxnm m mnka ka ka ka ka ka kAka ka kaka也就是ka 是指用k 去乘A 的每一个元素,另证,其满足以下规律: (1)K (A+B )=KA+KB ,(K+L )A=KA+LA ,(分配律) (2)(KL )A=K (LA )=L (KA ),(结合律), (3)若KA=0,则K=0或A=0。
(完整版)线性代数笔记

等行变换,则得到的是 。
对于第二类的可先转化为第一类的 ,即由
两边转置得
按上例的方法求出 进而求出 X
二.初等变换的性质
定理 2.5.1 设线性方程组的增广矩阵 经有限次的初等行变换化为 ,则以 与
为增广矩阵的方程组同解。 定理 2.5.2 任何矩阵都可以经有限次初等行变换化成行最简形式,经有限次初等变换 (包括行及列)化成等价标准形。且其标准形由原矩阵惟一确定,而与所做的初等变换无
3、矩阵的乘法 设 A=(aij)m×n,B=(bjk)n×l,则 A*B=C=(cik)m×l 其中 C=Σaijbjk(j=1,n) 注意;两个矩阵相乘必须第一个矩阵的列数等于第二个矩阵的行数;矩阵乘法不满足交换 律,即 AB 不一定等于 BA;矩阵乘法有零因子,即 A≠0(零矩阵),B≠0(零矩阵),但 有可能 A*B=0(零矩阵) 矩阵的乘法适合以下法则: (1)结合律:(AB)C=A(BC) (2)分配律(A+B)C=AC+BC
hing at a time and All things in their being are good for somethin
此处 0 表示与 A 同型的零矩阵,即 A=(aij)m×n ,0=0m×n (4)矩阵 A=(aij)m×n,规定-A=(-aij)m×n,(称之为 A 的负矩阵),则有 A+(-A)=(A)+A=0
如果 n 个未知数,n 个方程的线性方程组的系数行列式 D≠0,则方程组
定理 1.4.3 如果 n 个未知数 n 个方程的齐次方程组的系数行列式 D≠0,则该方程组只有零 解,没有非零解。 推论 如果齐次方程组有非零解,则必有系数行列式 D=0。
第二章 矩阵
一、矩阵的运算
MIT公开课-线性代数笔记

目录方程组的几何解释 (2)矩阵消元 (3)乘法和逆矩阵 (4)A的LU分解 (6)转置-置换-向量空间R (8)求解AX=0:主变量,特解 (9)求解AX=b:可解性和解的解构 (10)线性相关性、基、维数 (11)四个基本子空间 (12)矩阵空间、秩1矩阵和小世界图 (13)图和网络 (14)正交向量与子空间 (15)子空间投影 (18)投影矩阵与最小二乘 (20)正交矩阵和Gram-Schmidt正交化 (21)特征值与特征向量 (27)对角化和A的幂 (28)微分方程和exp(At)(待处理) (29)对称矩阵与正定性 (29)正定矩阵与最小值 (31)相似矩阵和若尔当型(未完成) (32)奇异值分解(SVD) (33)线性变换及对应矩阵 (34)基变换和图像压缩 (36)NOTATIONp:projection vectorP:projection matrixe:error vectorP:permutation matrixT:transport signC(A):column spaceN(A):null spaceU:upper triangularL:lower triangularE:elimination matrixQ:orthogonal matrix, which means the column vectors are orthogonalE:elementary/elimination matrix, which always appears in the elimination of matrix N:null space matrix, the “solution matrix” of AX=0R:reduced matrix, which always appears in the triangular matrix, “IF00”I:identity matrixS:eigenvector matrixΛ:eigenvalue matrixC:cofactor matrix关于LINER ALGEBA名垂青史的分析方法:由具象到抽象,由二维到高维。
MIT线性代数中文笔记

1.31
31. 线性变换及对应矩阵
1.32
32. 基变换和图像压缩
1.33
33. 复习三
1.34
34. 左右逆和伪逆
1.35
35. 期末复习
1.36
2
MIT 线性代数中文笔记
中文 Linear Algebra (线性代数) 笔记
ApacheCN 机器学习交流群 629470233 ApacheCN 学习资源
Contents (目录)
01. 方程组的几何解释 01.01 方程组的几何解释
02. 矩阵消元 02.01 矩阵消元
03. 乘法和逆矩阵 03.01 矩阵乘法和逆矩阵
04. A的LU分解 04.01 A的LU分解
05. 转置-置换-向量空间R
3
MIT 线性代数中文笔记
05.01 矩阵转置 05.02 置换 05.03 向量空间 R 06. 列空间和零空间 06.01 列空间 06.02 零空间 07. 求解Ax=0:主变量,特解 07.01 主变量 07.02 特解 08. 求解Ax=b:可解性和解的结构 08.01 可解性 08.02 解的结构 09. 线性相关性、基、维数 09.01 线性相关性 09.02 基 09.03 维数 10. 四个基本子空间 10.01 基本子空间 10.02 四个基本子空间 11. 矩阵空间、秩1矩阵和小世界图 11.01 矩阵空间 11.02 秩1矩阵 11.03 小世界图 12. 图和网络 12.01 图 12.02 网络 13. 复习一 13.01 复习一 14. 正交向量与子空间 14.01 正交向量 14.02 子空间 15. 子空间投影 15.01 子空间投影 16. 投影矩阵和最小二乘 16.01 投影矩阵 16.02 最小二乘 17. 正交矩阵和Gram-Schmidt正交化 17.01 正交矩阵 17.02 Gram-Schmidt正交化 18. 行列式及其性质
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录方程组的几何解释 (3)矩阵消元 (3)乘法和逆矩阵 (5)A的LU分解 (6)转置-置换-向量空间R (8)求解AX=0:主变量,特解 (9)求解AX=b:可解性和解的解构 (10)线性相关性、基、维数 (11)四个基本子空间 (12)矩阵空间、秩1矩阵和小世界图 (13)图和网络 (14)正交向量与子空间 (16)子空间投影 (18)投影矩阵与最小二乘 (20)正交矩阵和Gram-Schmidt正交化 (22)特征值与特征向量 (27)对角化和A的幂 (28)微分方程和exp(At)(待处理) (29)对称矩阵与正定性 (29)正定矩阵与最小值 (31)相似矩阵和若尔当型(未完成) (32)奇异值分解(SVD) (33)线性变换及对应矩阵 (34)基变换和图像压缩 (36)NOTATIONp:projection vectorP:projection matrixe:error vectorP:permutation matrixT:transport signC(A):column spaceN(A):null spaceU:upper triangularL:lower triangularE:elimination matrixQ:orthogonal matrix, which means the column vectors are orthogonalE:elementary/elimination matrix, which always appears in the elimination of matrixN:null space matrix, the “solution matrix” of AX=0R:reduced matrix, which always appears in the triangular matrix, “IF00”I:identity matrixS:eigenvector matrixΛ:eigenvalue matrixC:cofactor matrix关于LINER ALGEBA名垂青史的分析方法:由具象到抽象,由二维到高维。
方程组的几何解释1. 行图像,列图像2. 矩阵乘法:方法一. 列向量的线性组合 方法二. 左行乘以右列3. 矩阵右乘向量(竖直):矩阵列的线性组合4. 矩阵左乘向量(横平):矩阵行的线性组合矩阵消元1. 课程目标:讨论消元法有效,以及无效的情况 用矩阵语言描述消元法2. 消元有效和失效a) 消元目标:把A 矩阵化为U 矩阵(主元不能出现0) b) 消元失效:主元是0:行交换可以解决主元为0的暂时性失效,但当底下的行中再也没有非0元素时,消元就彻底失效了。
3. 用矩阵来表示矩阵变换(消元) a) 例:→⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-−−−−−−−−→−⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡140183121100013001140183121211倍3中减去2目的:从E r r⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-140220121⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡−−−−−−−−→−5002-2012112-0010001322倍2中减去3目的:从E r r b) 针对上一例,假设总变换E=E 32E 21,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=126013001E ,这个矩阵对于消元法中出现的乘数来说太不直观了,然而E -1=E 21-1E 32-1,这个逆比较直观,因为它们是初等列变换的逆变换,只用改变乘数的系数就可以得到它们的逆,这就引出了下一章的内容:A 的LU 分解。
⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||||||||||||||⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡d c b a =a ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||+b ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||+c ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||+d ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡|||| []d c b a ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----------------=a []----+b []----+c []----+d []---- 4. 置换矩阵乘法和逆矩阵1. 矩阵乘法的四个方法AB=C a) 左行乘右列b) 线性组合列⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||||||||||||||⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡d c b a =a ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||+b ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||+c ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||+d ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡||||c) 线性组合行 []d c b a ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----------------=a []----+b[]----+c []----+d []----d) 左列乘右行 [][]00987614320061987432⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡ 2. 矩阵的逆a) 只有方阵才可能可逆(非方阵也可以求逆矩阵,不过是伪逆) b) 左逆等于右逆 c) 没有逆的情况 i. 行列式为0,列向量共线ii.存在非零向量X ,使AX=0(零空间有非零元素)d) 存在逆的情况 i. 求逆和解方程组是一回事 ii.Gauss-Jordan 消元法例:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡10017231d c b a步骤:⎥⎦⎤⎢⎣⎡10017231 ⎥⎦⎤⎢⎣⎡→⎥⎦⎤⎢⎣⎡→12-3-7100112-011031⎥⎦⎤⎢⎣⎡12-3-7就是所求的A -1。
3. 求逆总结 a) 正交矩阵Q -1=Q Tb) 上三角或者下三角矩阵求逆: i.例:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡100012001100012-0011- ii.例:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡150********-00100011- c) 克拉默法则求逆(代数余子式)A 的LU 分解1. 假设A 和B 都可逆,(AB)-1=B -1A -1,因为括号可以移动,就像先脱鞋子,再脱袜子,逆动作是先穿袜子,再穿鞋子2. (A -1)T =(A T )-1(转置和逆可以颠倒)3. A 的LU 分解 a) 例:A=⎥⎦⎤⎢⎣⎡7812,对其进行消元,目标是得到U 。
i.⎥⎦⎤⎢⎣⎡14-01⎥⎦⎤⎢⎣⎡7812=⎥⎦⎤⎢⎣⎡3012⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡→301214017812A L Uii.A=LU →A=L ’DU ’d) 3*3矩阵的情形 i. E 32E 31E 21A=U →A=E 21-1E 31-1E 32-1U →A=LUii.例:E 31E 21=E 和(E 21)-1(E 31)-1=L 的例子:求E 不容易,但是想要得到L ,只要把所有消元乘数写进来,就可以得到!iii.总结:E 不好求,E 不重要,好求的是L ,重要的是L 。
e) 一个n*n 矩阵A ,消元需要多少次?(“一次”:一般乘法+减法一次) n 2+(n-1)2+…+22+12=331n f) 考虑行互换的情形:转置与置换(3*3) i. 互换0行:Iii.P 12=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡100001010 iii. P 13=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡001010100 iv. 总共有6种。
v. 如果取逆,只要把行换回去即可。
逆矩阵仍然在这六个里。
vi.P -1=P T4. 总结:A 的LU 分解,U 是直观上看的消元得到上三角矩阵的结果,L 比较特殊,它记录了每一次的行变换。
要注意的是,因为L 是初等变换矩阵的逆矩阵,所以L中对角线元素的符号不发生改变,但是要取倒数;而其他元素的符号均发生改变。
转置-置换-向量空间R1.置换矩阵:P,用来完成行互换的矩阵。
2.置换矩阵是行重新排列了的单位矩阵。
3.置换矩阵的逆矩阵和它的转置矩阵相等。
P T P=I.4.转置矩阵(略)5.对称矩阵:symmetric matrix,转置后和原矩阵相等(注意:对角线两边符号不同也有可能是对称矩阵,满足A T=A即可)。
6.A T A一定是一个对称阵。
7.向量空间:向量张成的空间。
8.因为向量乘以0必须在向量空间里,所以向量空间的子空间必定过原点。
9.一个向量空间本身就是它自己的一个子空间。
它是最大的子空间。
10.零向量是所有实空间的子空间。
它总是构成最小的子空间。
11.矩阵如何构造子空间?1.1通过列向量构造。
每列的元素个数m代表这个列向量属于几维的空间,如果列向量个数n<m,代表这个矩阵展现的是“降维打击“,此时列向量的所有线性组合(列空间)构成一个子空间。
1.2 个人将其命名为“棒型矩阵”。
求解AX=0:主变量,特解注:主元,每行的第一个非零元素1. 课程目标:AX=0的算法是怎样的?2. 消元时要保证:零空间不会改变。
3. 若主元为0,则看下面是否有可以互换的行,或右边是否有可以互换的列。
4. A 的目标是化为阶梯矩阵。
5. 非0主元的个数:秩,这就是秩在算法下的定义。
6. 化为阶梯矩阵后,寻找主变量。
先找到主元所在的列(主列),剩余的列称为自由列,表示可以任意分配数值给这些列所对应的解向量的元素。
例如:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡042000200221⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321x x x x =0 中,c 1和c 3是主列,c 2和c 4是自由列,所以x 2和x 4可以自由赋值,而x 1和x 3需要解出。
7. r (rank )表示的是起到作用的主元个数,也就是起作用的方程个数,n-r=自由变量的个数=不起作用的方程个数=零空间的维数8. 简化行阶梯矩阵:让主元上下都是0,包含了所有信息,包括主行和主列,单位矩阵(主行和主列交汇处),0行表示这一行是非0行的线性组合 9. 简化的步骤相当于回代 10.R=⎥⎦⎤⎢⎣⎡00F I ,F 是自由矩阵,I 是r*r 单位方阵。
如何用这个矩阵解出所有特解?构造一个零空间矩阵N ,它的各列由特解组成。
N=⎥⎦⎤⎢⎣⎡I F -, RN=0. 11.矩阵主列的个数与其转置相同。
12.X=cN.求解AX=b :可解性和解的解构1. 首先要交代的是:AX=b 不一定有解,是否有解要通过消元来判断。
2. b 要满足什么条件,AX=b 才有解? a) b 属于A 的列空间b) 如果A 各行的线性组合得到零行,b 中同样线性组合也得到0. 3. 如果有解,如何求解?a) 找一个特解:将所有自由变量设为0,解出AX=b 中的主变量 b) 特解加上零空间中的任意X ,最终结果是所有解。
为什么??? 因为Ax p =b ,Ax n =0所以A(x p +x n )=Ax p +Ax n =b+0=b.c) 对于方程组某解,它与零空间里任意向量之和仍然是方程组的解。