联合建模与仿真系统概述
CarSim与Simulink联合仿真
CarSim与Simulink联合仿真1 软件介绍在MATLAB中,Simulink是用来建模、仿真和分析动态多维系统的交互工具。
可以使用Simulink提供的标准模型库或者自行创建模型库,描述、模拟、评价和精化系统行为,同时,Simulink和MATLAB之间的联系十分便捷,可以使用一个灵活的操作系和应用广泛的分析和设计工具。
最后,除了可以使用Simulink建模和仿真之外,还可以通过其他软件联合来完成更多的分析任务,如CarSim、ADAMS、AMEsim等许多软件。
CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。
CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。
CarSim软件的主要功能如下:●适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV;●可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性;●可以通过软件如MA TLAB,Excel等进行绘图和分析;●可以图形曲线及三维动画形式观察仿真的结果;●包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;●程序稳定可靠;●软件可以实时的速度运行,支持硬件在环,CarSim软件可以扩展为CarSim RT,CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;●先进的事件处理技术,实现复杂工况的仿真;●友好的图形用户界面,可快速方便实现建模仿真;●提供多种车型的建模数据库;●可实现用户自定义变量的仿真结果输出;●可实现与simulink的相互调用;●多种仿真工况的批运行功能;2 CarSim与Simulink联合仿真2.1 Simulink接口1) 变量由Simulink导入CarSim(导入变量)可由Simulink导入到CarSim中的变量可达160多个,主要分为以下几部分:⏹控制输入⏹轮胎/路面输入⏹轮胎的力和力矩⏹弹簧及阻尼力⏹转向系统的角度⏹传动系的力矩⏹制动力矩及制动压力⏹风的输入⏹任意的力和力矩图2.1 CarSim导入变量分类我们可以在Simulink中定义变量,也可以在其他软件中定义并导入Simulink模型中,导入的变量将叠加到CarSim内部相应的变量中。
LVC联合仿真系统中关键技术研究
LVC联合仿真系统中关键技术研究摘要:本文围绕LVC联合仿真系统中需要解决的重用和互操作问题进行展开。
通过桥接器和软总线实现仿真模型的重用,通过软总线进行时间推进解决时间一致性问题。
关键词:软总线;重用;互操作;时间推进Research On Key Technology of LVC Simulation SystemCao Xiaoyang,Zhang Bangliang,Chen Kexing(Nanjing Research Institute of Simulation and Technology,Nanjing 210016,China)Abstract:The paper focuses on reuse and interoperation problems in LVC co-simulation system.The bridge and soft bus are used to realizethe reuse of simulation model,and the time consistency problem issolved through the soft bus.Keywords:soft bus;interoperability;reusability;time advance1引言LVC联合仿真是指将真实、虚拟和构建资源联合起来进行的仿真试验。
联合仿真主要解决大规模复杂系统仿真、降低研制费用、缩短研制周期、提高仿真置信度、降低运维难度及成本等问题。
解决上述问题的思路都集中在重用与互操作上,因此研究LVC联合仿真仿真的主要工作是发展和确保仿真中的各种重用和互操作技术。
2分布式仿真LVC联合仿真系统涉及真实、虚拟、构建资源模型之间的数据协同,技术体制众多。
下面介绍几种比较典型的分布式仿真技术。
仿真网络(Simulation Networking,SIMNET)是上个世纪80年代由美国国防部高级研究计划局制定的一项计划,旨在将各类仿真器连接到同一网络,组成一个数据共享的仿真环境。
基于MATLAB与ADAMS的机械臂联合仿真研究
基于MATLAB与ADAMS的机械臂联合仿真研究一、本文概述随着机器人技术的快速发展,机械臂作为机器人执行机构的重要组成部分,其运动性能和控制精度对于机器人整体性能具有决定性影响。
为了提升机械臂的设计水平和控制性能,研究者们不断探索新的仿真技术。
在此背景下,基于MATLAB与ADAMS的机械臂联合仿真研究应运而生,为机械臂的设计优化和控制策略的开发提供了有力支持。
本文旨在探讨基于MATLAB与ADAMS的机械臂联合仿真的方法与技术,并对其进行深入的研究。
介绍了MATLAB和ADAMS软件的特点及其在机械臂仿真中的应用优势。
阐述了机械臂联合仿真的基本原理和步骤,包括模型的建立、动力学方程的求解、控制算法的设计等。
接着,通过实例分析,展示了联合仿真在机械臂运动学性能分析和控制策略验证方面的实际应用。
总结了联合仿真的研究成果,并展望了未来的发展方向。
本文的研究不仅有助于提升机械臂的设计水平和控制性能,也为相关领域的研究者提供了有益的参考和借鉴。
通过不断深入研究和完善联合仿真技术,将为机器人技术的发展注入新的活力。
二、MATLAB与ADAMS联合仿真的理论基础在进行MATLAB与ADAMS的机械臂联合仿真研究时,理解两种软件的理论基础和它们之间的交互方式是至关重要的。
MATLAB作为一种强大的数值计算环境和编程语言,广泛应用于算法开发、数据可视化、数据分析以及数值计算等多个领域。
而ADAMS(Automated Dynamic Analysis of Mechanical Systems)则是一款专门用于多体动力学仿真的软件,特别适用于复杂机械系统的运动学和动力学分析。
MATLAB与ADAMS的联合仿真理论基础主要包括以下几个方面:接口技术:MATLAB与ADAMS之间的数据交换和通信是联合仿真的核心。
通常,这需要通过特定的接口技术来实现,如ADAMS提供的Control接口或MATLAB的Simulink接口。
ADAMS与Matlab联合仿真
7.1机械夹紧机构建模使用实例机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。
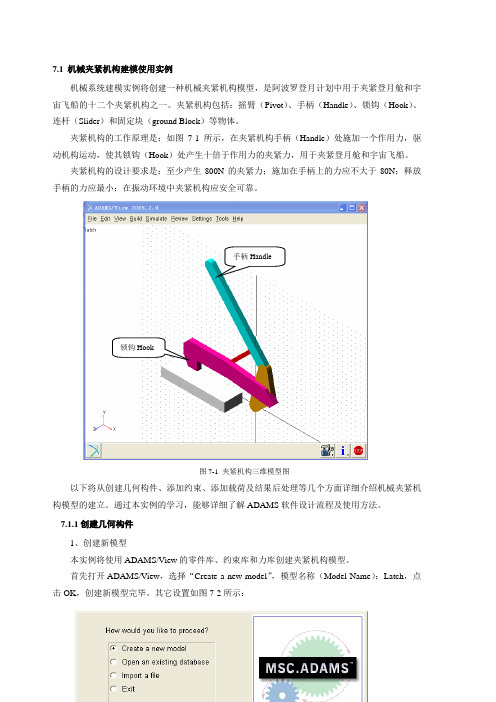
夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(ground Block)等物体。
夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。
夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不大于80N;释放手柄的力应最小;在振动环境中夹紧机构应安全可靠。
手柄Handle锁钩Hook图7-1 夹紧机构三维模型图以下将从创建几何构件、添加约束、添加载荷及结果后处理等几个方面详细介绍机械夹紧机构模型的建立。
通过本实例的学习,能够详细了解ADAMS软件设计流程及使用方法。
7.1.1创建几何构件1、创建新模型本实例将使用ADAMS/View的零件库、约束库和力库创建夹紧机构模型。
首先打开ADAMS/View,选择“Create a new model”,模型名称(Model Name):Latch,点击OK,创建新模型完毕。
其它设置如图7-2所示:图7-2 创建新模型2、设置工作环境选择菜单栏【Settings】→【Units】命令,设置模型物理量单位,如图7-3所示:图7-3设置模型物理量单位选择菜单栏【Settings】→【Working Grid】命令,设置工作网格,如图7-4所示:图7-4设置工作网格3、创建设计点设计点是几何构件形状设计和位置定位的参考点。
本实例将通过设计点列表编辑器创建几何构件模型所需要的全部设计点。
选择并点击几何模型库(Geometric Modeling)中的点(Point),下拉菜单选择(Add to Ground)、(Don’t Attach),并单击Point Table列表编辑器,创建并生成Point_1、Point_2等六个设计点,如图7-5、图7-6所示:图7-5设计点列表编辑器图7-6创建设计点4、创建摇臂(Pivot)选择并点击几何模型库(Geometric Modeling)中的平板(Plate),设置平板厚度值(Thickness)为1,圆角半径(Radius)为1,用鼠标左键选择设计点:Point_1、Point_2、Point_3,按鼠标右键完成摇臂(Pivot)的创建,将其重新命名(Rename)为Pivot,如图7-7所示:图7-7创建摇臂5、创建手柄(Handle)选择并点击几何模型库(Geometric Modeling)中的连杆(Link),用鼠标左键选择设计点:Point_3和Point_4,完成手柄(Handle)的创建,将其重新命名(Rename)为Handle,如图7-8所示:图7-8创建手柄6、创建锁钩(Hook)选择并点击几何模型库(Geometric Modeling)中的拉伸体(Extrusion),选择“New Part”和“Clsoed”,拉伸体长度(Lengh)设为1,用鼠标左键选择表7-1所示的11个位置,按鼠标右键完成锁钩的创建,将其重新命名(Rename)为Hook,如图7-9示:表7-1锁钩节点坐标图7-9创建锁钩7、创建连杆(Slider)选择并点击几何模型库(Geometric Modeling)中的连杆(Link),用鼠标左键选择设计点:Point_5和Point_6,完成连杆(Slider)的创建,将其重新命名(Rename)为Slider,如图7-10所示:图7-10创建连杆8、创建固定块(Ground Block)选择并点击几何模型库(Geometric Modeling)中的长方体(Box),选择“On Ground”,使其与大地(Ground)固结在一起,按下图创建固定体用鼠标左键选择设计点:Point_5和Point_6,完成连杆(Slider)的创建,将其重新命名(Rename)为Slider,如图7-11所示:图7-11创建固定块7.1.2添加约束1、添加旋转约束副选择并点击约束库(Joints)中的旋转副(Revolute Joints);选择“1 Location”(一个位置),“Normal To Grid”(垂直于工作网络),用鼠标左键选择Point_1,创建摇臂和大地的约束副;选择“2 Bodies - 1 Location”(两个物体一个位置),“Normal To Grid”(垂直于工作网络),选择摇臂和锁钩两个物体,左键选择Point_2,创建摇臂和锁钩的约束副;同理选择摇臂和手柄,位置为Point_3,手柄和连杆,位置为Point_5,创建摇臂和手柄、手柄和连杆的旋转约束副。
基于CarSim和Simulink的EPS系统联合仿真分析_张玉洁
器
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
20
一 般 规 律 , 无 EPS 系 统 时 的 转 向 盘
最大转矩值为 20N·m,更加符合实际 15
情 况 ;开 启 EPS 后 ,能 有 效 的 提 高 转
10
向轻便性,转矩最大值下降为 8N·m,
14 汽车维修 2015.7
汽车诊所
AUTOMOBILE MAINTENANCE
6DCT250 变 速 器 是 一 款 干 式 双
该款变速器的装配工艺较复杂,
6DCT250
离合自动变速器,又称 DPS6,具有 6
稍不注意可能导致离合器总成报
个前进挡和 1 个倒挡, 最大承受扭 矩 为 250N·m,重 量 约 73kg,主 要 应 用于福特新福克斯、 新嘉年华以及 翼博等车型上。 该变速器由福特与 德国格特拉克合作开发, 变速器核 心零部件之一的双离合器模块来自 供 应 商 德 国 舍 弗 勒 旗 下 的 Luk 公 司。
而且比较稳定,波动较小。 5
五、结论
转 向 盘 转 矩 (N·m)
0
文 章 主 要 在 Simulink 环 境 中 建
立 了 EPS 系 统 模 型 并 设 计 了 控 制 策
-5 略,然后利用动力学仿真软件 CarSim
-10
-15
-20 -500
-400 -300 -200 -100 0 100 转 向 盘 转 角 (°)
二、EPS 系统控制策略设计 EPS 系 统 控 制 策 略 分 为 上 、下 2 层, 上层控制是对目标电流的控制, 主要是根据汽车转向工况的状态参 数进行工作模式的选择,且进一步确
协同智能建模与协同智能仿真

协同、 协商 、 协力 、 协作 , 实现“ 协调化 ” 的理论 、 方法和策略 。
表 1 建模 与 仿 真 技 术 的发 展 方 向
2 建模 与仿 真 技术 的发展 方 向
“ 建模 与仿真技术”的发展 方向 , 如表 1 所示 。
3 协 同建模 与仿 真 的理 论基础
“ 同建模 与仿真” 协 的理论基 础 ( 如图 2所示 ) :协 调 是 “ 学 ” 协 调” C o iao ) 味着 : 同、 商 、 。“ ( or nt n 意 d i 协 协 协力 、 协作 、
集成化 、 能化广义模 型 , 图 78 示 。 智 如 、所
由数据库 、 知识 库 、 图像 库 、 言 , 语 …等 相互 协调 组成 的
多库协 同软件系统 , 智能管理 》 见《 。例 如 : 并列 型多库 协 ①
同软件 结构 , 图 1 所 示 。② 知识 主导 型多库 协 同软件 结 如 1
ABS TRACT: r s n ,te s se mo ei g a d smu ai n ae d v lp n o a d t e d r cin o a mo iain, Atp e e t h y t m d l n i lt r e eo i g tw r h i t fh r n z t n o e o o it l cu l ain,i t ga in a d n t o k n d l g a d s lt n f rc mp iae a g y t ms h sp p r i a n el t a i t e z o n e r t n e w r i g mo ei n i a i o o l td lr e s se .T i a e s o n mu o c s e i l n i d rp r gv n b uh ri 0 9 d rn e4 h C i a s se mo ei g a d s lt n tc n lg p f - p ca v t e o t ie y a t o 2 0 u g t t h n y tm d l n i a i e h oo t o i e n i h n mu o y o r m.I r e o p o t h a mo iai n ne lcu l ai n n e ain a d n t r i g lv lo y t m d l g u n o d rt r moe t e h r n z t ,i tl t ai t ,i tg t n ewok n e e fs se mo ei o e z o r o n a d smua in,a d t e e rh a d d v lp t e n w t o s e c n lg ,n w y tms fr C o e ai e I tl — n i lt o n o rs a c n e eo e meh d ,n w t h oo h e y e s se o p r t n el o v i g n d l g a d C o e a ie I t l g n i l t n h i o t n sa e t ed s u so n d v lp n i cin o e tMo ei n o p r t n el e tS mu ai ,t e man c n e t r h ic s in o e eo ig d r t f n v i o e o s se mo ei g a d smu a in,t e p o o as o e c n e t h o y f n a n ,d s n i e o e M1s h me e y t m d l n i lt n o h r p s l fn w o c p ,t e r u d me t e , d a v r c e ,k y ' g
simulink建模与仿真流程

simulink建模与仿真流程我们需要在Simulink中创建一个新的模型。
打开Simulink软件后,选择“File”菜单中的“New”选项,然后选择“Model”来创建一个新的模型。
接着,我们可以在模型中添加各种组件,如信号源、传感器、执行器等,以及各种数学运算、逻辑运算和控制算法等。
在建模过程中,我们需要定义模型的输入和输出。
在Simulink中,可以使用信号源模块来定义模型的输入信号,如阶跃信号、正弦信号等。
而模型的输出信号可以通过添加显示模块来实现,如示波器模块、作用域模块等。
接下来,我们需要配置模型的参数。
在Simulink中,可以通过双击组件来打开其参数设置对话框,然后根据需求进行参数配置。
例如,对于控制系统模型,我们可以设置控制器的增益、采样时间等参数。
完成模型的配置后,我们可以进行仿真运行。
在Simulink中,可以选择“Simulation”菜单中的“Run”选项来运行仿真。
在仿真过程中,Simulink会根据模型的输入和参数进行计算,并生成相应的输出结果。
我们可以通过示波器模块来实时显示模型的输出信号,以便进行结果分析和调试。
在仿真过程中,我们可以通过修改模型的参数来进行参数调优。
例如,可以改变控制器的增益值,然后重新运行仿真,观察输出结果的变化。
通过不断调整参数,我们可以优化模型的性能,使其达到设计要求。
除了单一模型的仿真,Simulink还支持多模型的联合仿真。
通过将多个模型进行连接,可以实现系统级的仿真。
例如,我们可以将控制系统模型和物理系统模型进行连接,以实现对整个控制系统的仿真。
在仿真完成后,我们可以对仿真结果进行分析和评估。
Simulink提供了丰富的分析工具,如频谱分析、时域分析和稳定性分析等。
通过对仿真结果的分析,我们可以评估模型的性能,并进行进一步的改进和优化。
Simulink建模与仿真流程包括创建模型、添加组件、定义输入输出、配置参数、运行仿真、参数调优、联合仿真和结果分析等步骤。
simulink概述

Simulink概述什么是SimulinkSimulink是一种图形化建模和仿真环境,用于多学科设计、建模、仿真和分析动态系统。
它是MATLAB的一个重要组成部分,适用于各种工程领域,如控制系统、通信系统、信号处理、图像处理等。
Simulink通过图形界面和可拖放的模块来建立和调整系统模型,具有直观、易用的特点。
Simulink的基本概念在使用Simulink建模系统之前,我们需要了解一些基本概念。
模块(Blocks)模块是Simulink中的基本构建单元,用于表示系统的各个组成部分。
模块可以是输入、输出、数学运算、逻辑运算、信号处理等等。
模块通过连接线连接在一起,形成系统模型。
系统模型(Model)系统模型是由各种模块构成的系统表示。
通过将各个模块连接在一起,形成一个完整的系统模型,可以用于对系统进行建模、仿真和分析。
信号流(Signal Flow)信号流表示模块之间的数据传递过程。
在Simulink中,信号可以是具有实时连续变化的模拟信号,也可以是离散的采样信号。
信号通过连接线在模块之间传递。
仿真和分析Simulink提供了强大的仿真和分析功能,可以用于验证和优化系统模型。
通过设置仿真参数和初始条件,可以对系统进行仿真,并获取系统在不同时间点的响应和输出。
此外,Simulink还提供了各种分析工具,如频域分析、时域分析、优化等,用于进一步分析和优化系统性能。
Simulink的优点和应用领域Simulink具有许多优点,使得它在工程领域得以广泛应用。
直观易用的建模环境Simulink提供了直观易用的图形界面,使得系统建模变得简单。
通过拖放模块和连接线,用户可以快速建立复杂的系统模型,而无需编写复杂的代码。
多学科设计支持Simulink支持多学科设计,可以在一个环境中集成不同学科的设计要求。
例如,可以将控制系统设计和信号处理设计集成到同一个Simulink模型中,以进行联合仿真和优化。
快速原型开发和验证Simulink的模块化特性使得系统开发变得更加快速和高效。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
联合建模与仿真系统概述棣华编译摘要:本文介绍美国“联合建模与仿真系统(JMASS)”项目研究室的联合建模与仿真系统。
该项目是一个仿真支持环境,它包含一个定义严格、文件齐全的接口标准集,模型可按此标准集建立。
JMASS提供的软件工具可帮助用户建立真实环境系统表示、组配模型块、将模型块组装成仿真系统、运行这些仿真系统、并且处理其结果。
JMASS是美国三军使用的产品,有近300在册用户,其参与者有美国陆军、海军、空军、国防部、国防情报局和工业部门。
系统采用普遍应用的面向对象技术,在WindowsNT,SunSolaris和SGIIRIX计算环境下运行一套单独的源代码。
JMASS目前以其标准的交战级和工程级仿真框架适用于采购、测试、评估及科研技术情报各界。
它为美国“基于仿真的采购”(SBA)政策提供了技术方面的关键要素。
JMASS遵从“高层体系结构”(HLA)的要求,以HLA提供的通用技术框架来保证各不同仿真部件的互操作性。
本文概述JMASS的概念、操作和实用性。
关键词:联合建模仿真建模1 JMASS背景美国早期没有正规化的建模和仿真,但在第二次世界大战期间,“运筹学”的发展以纯数学模型开始填补这一空白。
六十年代,由于通用计算机的广泛使用,大量的“多对多”交战模型被用来描述各种敌友实体间的事件交互,诸如模拟飞机和地对空导弹(SAM)发射场。
七十年代,建模和仿真的独立应用激增,有了更详细的设计和交战模型,假定和限制性条件各不相同,其结果也大相径庭。
美国仿真界经历了SAM仿真模型的开发,例如“加强型SAM模型”(ESAMS)。
对敌方指挥控制和建模的研究导致产生了SUPPRESSOR。
八十年代出现模型分级体系,为仿真结果的逻辑一致性提供了一整套工具,由此,一种模型的输出可以成为另一模型的输入。
由于模型开发费用巨大,因此模型可重用性成为研究热点。
基于对象技术的综合建模系统被提出来作为一种技术解决方案,以减轻模型开发和产权的费用负担。
进入九十年代,JMASS成为这一领域联合开发的先驱,随后出现了“联合仿真系统”(JSIMS)和“联合作战仿真”(JWARS)。
JMASS的最初设计用于支持武器系统开发和采购所需的高逼真度交战级分析。
自九十年代早期,JMASS从一个“唯UNIX”的系统发展成为一个紧凑高效的系统,所要求的硬盘空间不超过100Mbytes。
初始运行能力计划在2001年早期完成,全面运行能力计划在2004年完成。
到JMASS全部完成时,它将成为一个完整的仿真系统,包含一套定义良好的标准和规范、有效的仿真引擎、有助于分析人员和模型开发人员工作的各种工具和经过确认的威胁模型的基础结构。
一套包含图形用户接口(GUI)的单独的源代码在WindowsNT、SunSolaris、和SGIIRIX 计算环境下运行。
未来的JMASS将遵从高层体系结构要求,使JMASS能与其他仿真模型进行互操作。
JMASS目前为训练和客户支持提供了一种基础结构。
JMASS 软件同时提供了“模型开发者参考”和综合性“用户手册”。
在未来版本中,还将提供“上下文有关”在线帮助。
训练和客户支持功能现在已经由“JMASS项目研究部”提供使用,详细内容可从网上查到。
2 JMASS的实用性图1所示是四个层次的分析。
基于多时日、多对多战术情景的兵力结构研究划分在战役级。
使命级分析包括系统折衷研究,这种研究是根据裁剪的战术情景和更少并更详细的系统而进行的。
交战级和工程设计这两级包含对系统和子系统性能的研究,是根据少数非常详细的对象之间的交互作用而进行的。
最后,这四个级汇聚起来并形成图中所示的金字塔顶是其结果。
JMASS目前致力于工程设计级和交战级研究,但在不久的将来,JMASS的最大实用性将能够支持战术/交战级的分析。
图1 各分析级JMASS目前以其标准的交战级和工程设计级仿真框架适用于采购、测试、评估以及科技情报部门。
在整个基于仿真的采购政策中,它提供了技术方面的关键要素。
JMASS把武器系统放在一个虚拟的环境中,因此它对考虑采购的武器系统的设计和性能提供了一个分析框架。
这样,JMASS补充了美国国防部的其它建模与仿真项目(如JSIMS和JWARS)。
JMASS不是JSIMS和JWARS的一部分,而相反,它生成的数据被确认既可用于JSIMS,也可用于JWARS。
3 JMASS描述如图2所示,JMASS包含四个作用分明的部分:传统模型功能实现、红色威胁模型、蓝色数字系统模型、和体系结构。
本节讨论JMASS的体系结构和各种模型。
JMASS模型代表性地对应于真实环境中的物理实体,诸如飞机、雷达、导弹、电子对抗系统或导弹寻的头等。
JMASS定义并提供了标准化的一整套文件格式和应用程序接口,它们可使这些模型得以继续开发,使其具有互操作能力。
原始文件格式规范书吸收了模型设计信息,一个精致复杂的代码生成器将这些设计信息转换成编码框架,以保证所有的结构功能都能被模型开发者访问。
模型开发者仅需为他们的模型添加行为代码,理解并应用API服务功能以确保与其他模型的互操作性。
为了便于模型重用,JMASS采用开放式系统,使用通用面向对象语言,包括图形用户接口和应用一些基于商用标准的技术,如Microsoft Windows、POSIX、ANSI C++和OpenGL。
JMASS开放式体系结构允许裁剪和扩充。
标准工具套件在WindowsNT和UNIX平台上通过本机的“拖-放”文件管理器可以访问到。
提供的图形用户接口工具在Tcl/Tk中实现,Tcl/Tk可以在WindowsNT、Sun Solaris和SGI IRIX环境下运行。
现场专用的工具也可以添加到该体系结构中,以便对设计和分析功能进行裁剪和扩充。
图2 JMASS的四个部分3.1 JMASS体系结构JMASS提供了标准的服务功能模块,用于调度、空间服务、数据记录、报文登录、以及大气层和地形地貌的物理环境。
如果要求的话,可以由用户提供的物理环境和大气层模型来替代。
基于离散事件的调度程序是系统设定的,但可以应用实时的、基于帧的、或HLA时间-管理方法。
JMASS提供了一个分层的“六自由度”空间管理器及两个导出器,用于维护和推断空间实体在仿真过程中的状态。
标准的数据记录器可提供二进制、MATLAB、与/或ASCII码格式的仿真输出。
报文登录器显示仿真运行期间的彩色编码信息,并将这些信息储存到一个文件上。
体系结构的服务功能在IOCJMASS中将即插即用。
为了帮助工程设计人员快速轻松地开发仿真系统,JMASS提供了工具,可让模型开发人员专心致力于算法,而不必为软件费力。
该套标准工具在WindowsNT 和UNIX平台上通过本机的“拖-放”文件管理器都可以访问到。
图3示出了这些工具的一部分。
生成工具提供了自动的代码生成、相关生成、编译和链接。
它使用户与编译器和文件系统细节分离,但仍然可以通过程序描述文件来提供细节控制。
“GUI配置”用于仿真特性初始化并选择要记录的数据。
执行工具显示彩色编码信息,同时运行仿真程序。
它还用于仿真造形和调试,并支持命令行的执行。
图3 JMASS模型运行和GUI工具图4 SimView分析员级直观化工具JMASS的未来版本将含有“自动的模型转换工具”(AMC Tool)。
它是一个支持模型开发的虚拟程序设计工具,提供了一种把Simulink模型转换为JMASS 模型件的自动方法。
JMASS的一个学习管理程序叫做“灵活自动学习工具”(FAST),用以支持工程设计分析人员研究怎样应用JMASS。
FAST在局域网上有多种分布运行方式,用作参数分析和统计分析。
它也收集数据并为数据简化和分析提供工具。
FAST允许分析人员改变一个或多个仿真输入进行实验,还可将这些实验操作分布到多台计算机上,并以图象方式分析其结果。
JMASS有一个分析性能的直观化工具,叫做SimView,用来直观显示JMASS 中被仿真的“表演者”的空间行为。
在JMASS中用“空间信息表演者”(SpatialInfo Player)支持SimView。
开发人员在模型内不用增加任何程序设计来支持这种直观方式。
SimView以表演者在三度空间的直观化支持分析人员的需求。
使用SimView时,用户必须先运行仿真剧情。
在运行一个包含“空间信息表演者”的剧情时,生成一个.sv文件和SimView所需的全部数据,以便直观地重放剧情。
启动时显示出一个类似图4的窗口,SimView的重放窗口有上一系列控制键,允许用户调节重放速率;有多种视角和图象变比选项,重放时各项都可改变。
JMASS还有一个跨越式平台及后处理绘图工具,叫做Jplot。
Jplot读出在运行仿真剧情期间生成的“JMASS二进制日志数据”文件,并用电子数据表格显示这些数据。
根据这张表,用户可在竖/横栏中选择绘图要用的数据。
Jplot提供了种类繁多的选项,有坐标轴比例和形式设计、极座标图、线性-线性、对数线性、对数-对数座标图、同一类型图表叠加等。
附加选项有3-D绘图、网格/非网格图形、彩色编码和注解。
JMASS是一个开放式体系结构,有定义良好的“应用程序接口”(API),这些接口使它比较容易与商用产品连接。
这种能力已由“计算机探索”有限公司用Simthetica进行了演示。
图5所示是一张抽样输出瞬态图。
JMASS的BJD-to-Text软件工具可将JMASS的二进制日志数据转换成诸如MicrosoftExcel或MATLAB等软件工具所需的ASCII码文件。
JMASS还能够以MATLAB二进制格式记录数据。
这些数据可直接装进MATLAB工作区用于数据分析和绘图,也用于直观化表示。
许多用户正在对JMASS分析工具进行扩充。
一些定制的工具和图形用户接口是为一些专项分析而裁剪制作的。
基于Tc-Tk的JMASS“分析员能力工具”就是这种例子,目前正由“空军作战测试与评估中心”使用。
这一工具在JMASS未来版本中可以获得。
另一个工具扩展性的例子是基于JAVA语言的分析工具,叫JTEAM,由“空军信息战中心”研制而成,是内部使用的。
图6示出JTEAM的分析“表格板”。
3.2 JMASS模型JMASS以定义良好的应用程序接口提供结构化的服务。
JMASS模型用于描述表演者和真实环境中具有代表性的对应物,如飞机、雷达、导弹ECM系统、导弹寻的头等。
JMASS支持多种级别的仿真细节。
可以对一种JMASS模型的不同仿真细节进行开发或选择,以便与要上演的剧情相匹配。
JMASS允许模型细节在仿真或模型自身范围内变化。
应用程序接口是稳键的,足以处理各种高级或低级的仿真细节,即允许在同一仿真中使用高级或低级的仿真细节。
同样,在模型内部,细节的程度可以被集中在应用上需强调的一些方面。
模型中的细节极大地影响JMASS仿真的速度。